Rotation Invariant Pattern Detection¶
Overview¶
Pattern detection can be used to identify known features in a simulation in situ to reduce the amount of data needing to be written to disk. For simulations where physically meaningful patterns are already known, the orientation of the pattern may not be known a priori. Pattern detection can be unnecessarily slowed if the pattern detection algorithm must search for all possible rotated copies of a pattern template. Therefore, rotation invariance is a critical requirement. Moment invariants can achieve rotation invariance without the need for point to point correlations, which are difficult to generate in smooth fields. For an introduction to moment invariants, we recommend:
Flusser, J., Suk, T., & Zitová, B. (2016). 2D and 3D Image Analysis by Moments. John Wiley & Sons.
ALPINE has implemented two VTK filters that together are able to perform rotation invariant pattern detection. The algorithm upon which the moment invariants pattern detection is based can be found in:
Bujack, R., & Hagen, H. (2017). Moment Invariants for Multi-Dimensional Data. In Modeling, Analysis, and Visualization of Anisotropy (pp. 43-64). Springer, Cham.
Algorithm Description¶
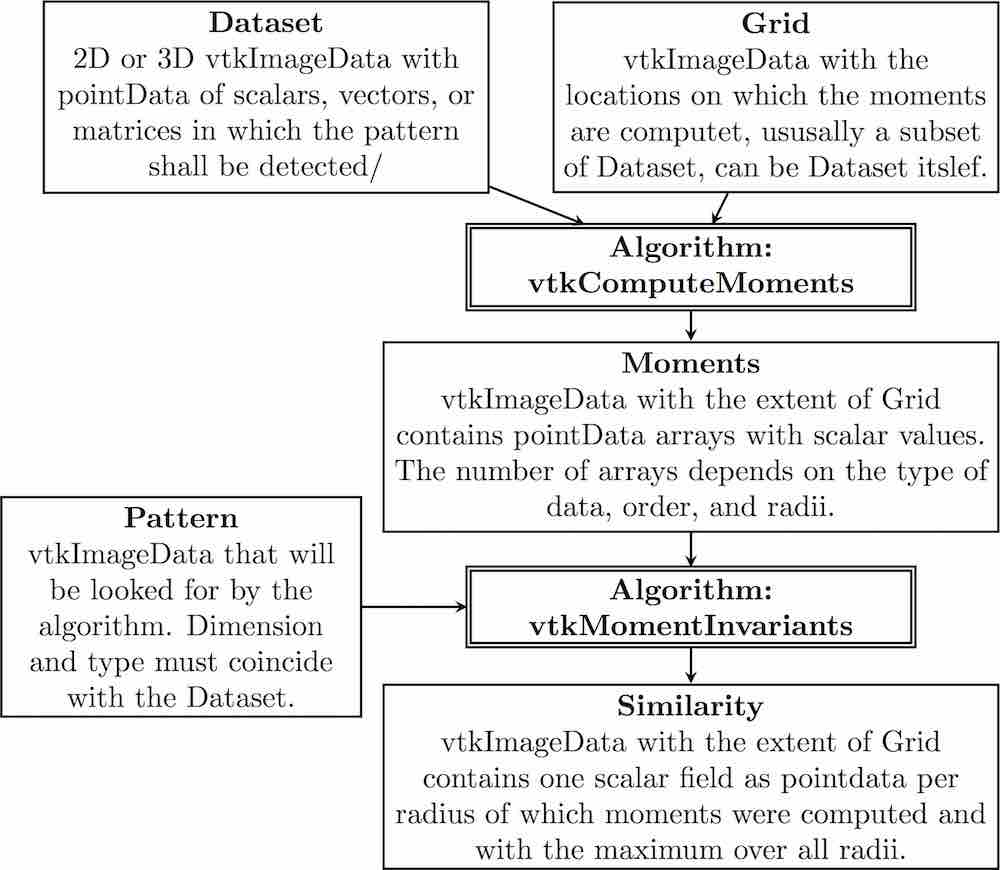
The input to pattern detection algorithm consists of three pieces which must match in data type and dimensionality:
- A 2D or 3D vtkImageData dataset of scalars, vectors, or matrices which will be searched for:
- A vtkImageData pattern
- A vtkImageData grid that defines the subset of (1) that is searched for the pattern; note that this may be the full dataset.
The first VTK filter, vtkComputeMments computes the moments while the second filter, vtkMomentsInvariants, performs the normalization based on the given pattern and computes the similarity. The architecture of the filter, with inputs and outputs, can be found in the following figure.
Extensions¶
The MomentInvariants module contains several extra algorithms and helper classes.
vtkMomentsHelper : a class that provides functions for the moments computation that
will be needed by vtkComputeMoments and vtkMomentInvariants.
vtkMomentsTensor : a class that provides the functionality to treat tensors of arbitrary
dimension and rank. It supports addition, outer product,
and contractions.
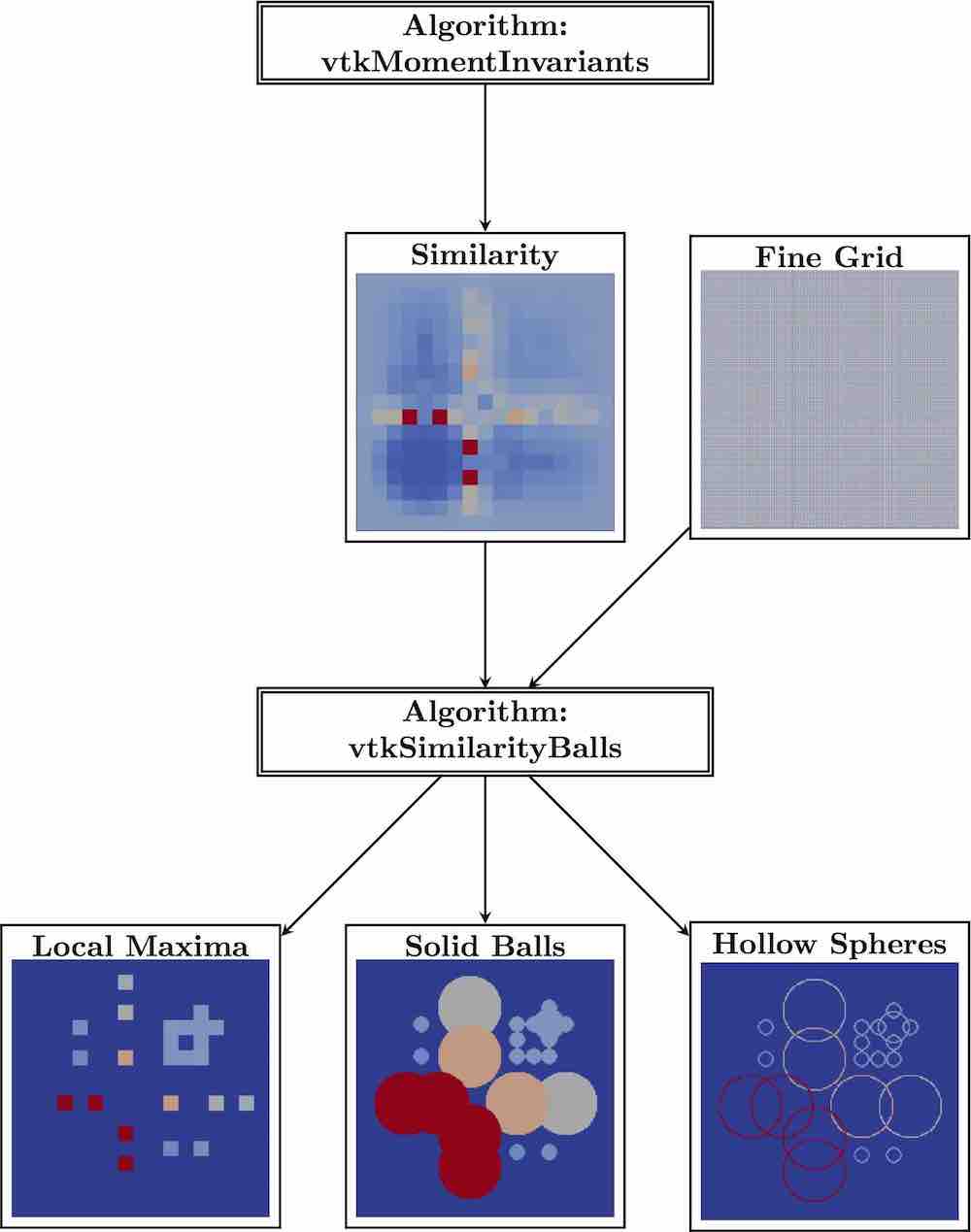
vtkSimilarityBalls : a filter that takes the similarity field produced by
vtkMomentInvariants and computes the local maxima in
space plus scale and produces the output
localMaxSimilarity that contains the similarity value
together with the corresponding radius at the maxima.
All other points are zero.
For further visualization, vtkSimilarityBalls also produces two output fields that encode the radius through drawing a solid ball or a hollow sphere around those locations. The second input, i.e. the grid, steers the resolution of the balls. It is helpful if its extent is a multiple of the first input’s. Then, the circles are centered nicely. The spheres/circles are useful for 2D visualizations, as they can be laid over a visualization of the field. The balls are good for 3D volume rendering or steering of the seeding of visualization elements.
The 2D visualzation is described in:
Bujack, R., Hotz, I., Scheuermann, G., & Hitzer, E. (2015). Moment invariants for 2D flow fields via normalization in detail. IEEE transactions on visualization and computer graphics, 21(8), 916-929
and the 3D counterpart in:
Bujack, R., Kasten, J., Hotz, I., Scheuermann, G., & Hitzer, E. (2015, April). Moment invariants for 3D flow fields via normalization. In Visualization Symposium (PacificVis), 2015 IEEE Pacific (pp. 9-16). IEEE.
A schematic overview of the use of vtkSimilarityBalls with example images is given in the following Figure.
vtkReconstructFromMoments : a filter that takes the momentData, as produced by
vtkComputeMoments or vtkMomentInvariants, and a grid.
It reconstructs the function from the moments (similar to
reconstructing a function from the coefficients of a Taylor
series). For the reconstruction, we first orthonormalize the
moments. Then, we multiply the coefficients with their
corresponding basis function and add them up.
Use Case Example - paraview-vis.py¶
The pattern detection algorithm can be demonstrated using ALPINE’s Ascent infrastructure and its built-in example integration, the Cloverleaf3D proxy application (http://uk-mac.github.io/CloverLeaf3D/).
In this case, the ascent_actions.json (below) points to a python script, paraview-vis.py that describes the visualization:
[
{
"action": "add_extracts",
"extracts":
{
"e1":
{
"type": "python",
"params":
{
"file": "paraview-vis.py"
}
}
}
},
{
"action": "execute"
},
{
"action": "reset"
}
]
An example python script and pattern can be found in: Instructions for In Situ ParaView Vis using Ascent Extract Interface https://github.com/danlipsa/ascent/tree/moment-invariants/src/examples/paraview-vis.
paraview-vis-cloverleaf3d-momentinvariants.py : example script calling the moments invariant
algorithm; make a symbolic link pointing
paraview-vis.py to this script.
expandingVortex.vti : example vtkImageData pattern for CloverLeaf3D
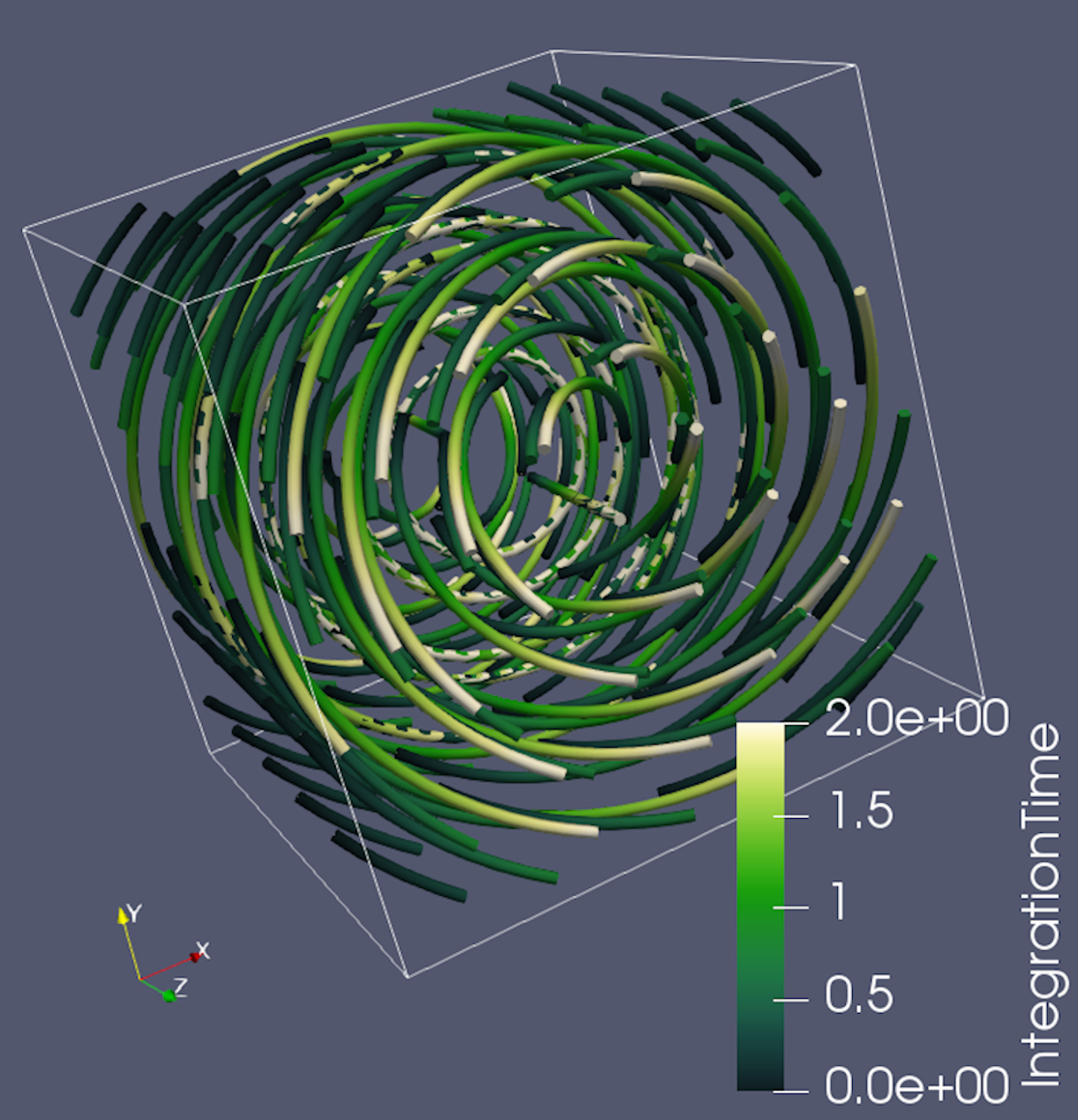
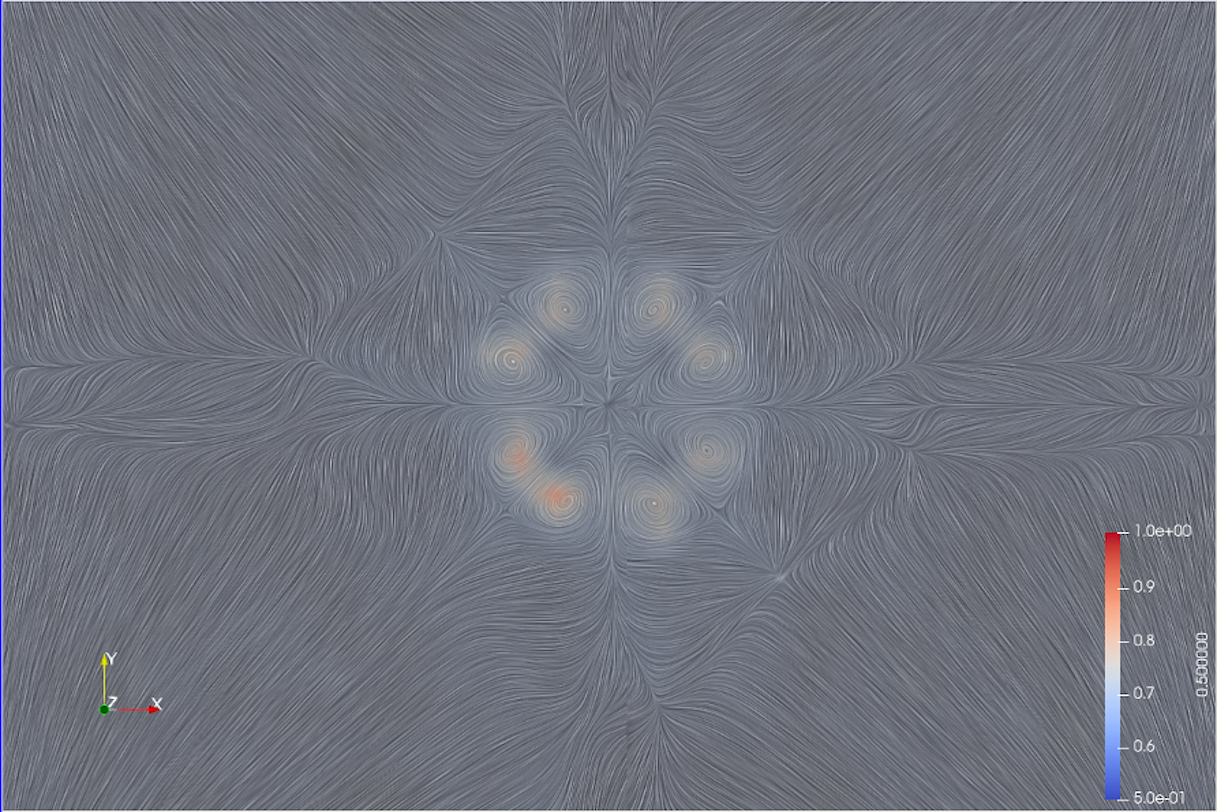
The pattern detection workflow was run in Ascent through ParaView. The images show the output of the algorithm for a vortex pattern for a single timestep of Cloverleaf running in parallel. On the left, we show the pattern visualized through streamlines. In the center, the 3D similarity output is volume rendered with red corresponding to high similarity to the pattern. On the right, we put a slice with line integral convolution (LIC) through the 3D data at the location of the strongest matches to verify the result.

Use Case Example - Bubble-finding¶
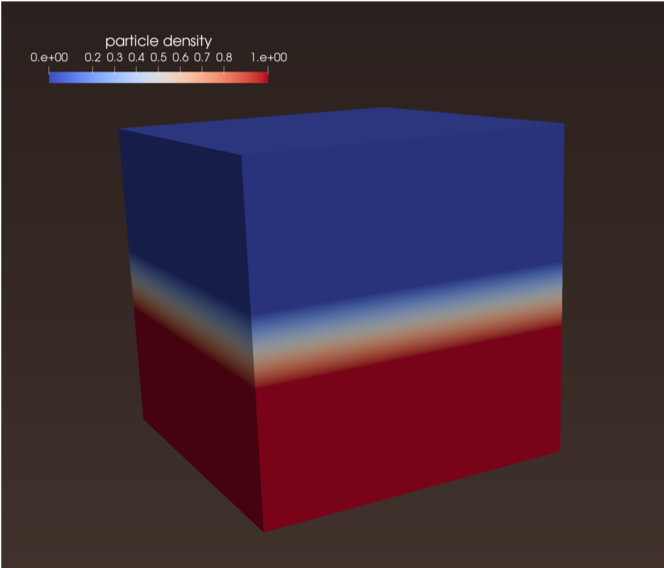
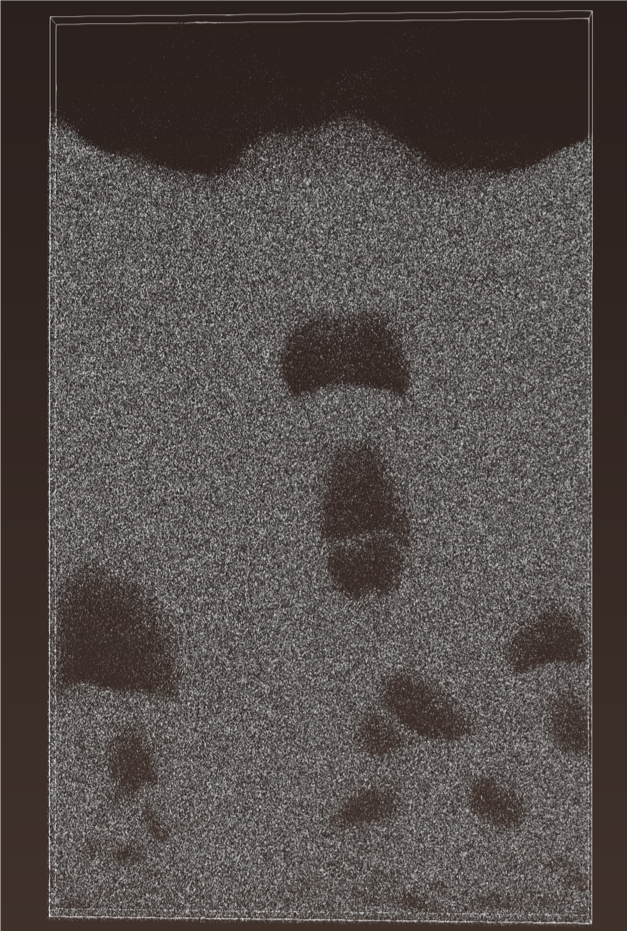
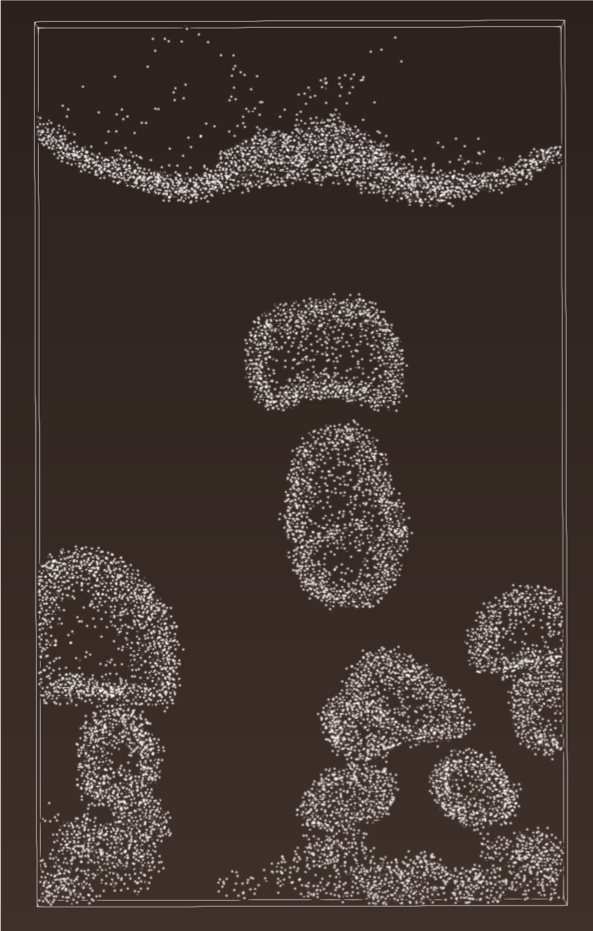
One example of using rotational invariant pattern detection is for data reduction in an MFIX-Exa bubbling bed simulation. The pattern that is used for the search is a simple density boundary – particles on one side, no particles on the other (left-hand image). The middle image shows the original dataset while the right-hand image shows the bubbles found by the rotational invariant pattern detection algorithm saving only 5% of the original data.
Repository Information¶
The moment invariants pattern detection code is found within the Kitware GitLab:
VTK: https://gitlab.kitware.com/vtk/vtk (dc2d04cdd3167d0a0aa95bc3efffa13f26c98516)
MomentInvariants: https://gitlab.kitware.com/vtk/MomentInvariants (df81d17f941989d9becdbcf10413e53af7a7ab10) Includes unit testing instructions.
Instructions for In Situ ParaView Vis using Ascent Extract Interface: https://github.com/danlipsa/ascent/tree/moment-invariants/src/examples/paraview-vis
The moment invariant pattern detection algorithm was developed by Roxana Bujack and Karen Tsai at Los Alamos National Laboratory and Dan Lipsa at Kitware, Inc.